

产品
AGV-自动导向车辆
高性能全防护潜伏AGV



这 潜伏移动机器人 系列通过其升降机构将库存货架或托盘移动到拣选站。它优化了运动性能并增强了安全保护,提供高效且经济高效的货到人解决方案。
对于仓库内的周转或生产线与仓库的连接,根据流动需求选择柔性搬运AGV来替代传统的叉车等搬运工具。金茂智能形成搬运系统、仓库、生产线之间的信息交互,保证全环节信息可追溯,打造智能柔性生产,减少人工使用需求。
1. 升降式
起重机器人是一种能够实现自主装载、起重、运输的自动化物流设备。其特点是配备提升装置,可以将货物从地面提升到较高位置,实现搬运、储存等任务。通常应用于工业和仓储物流应用,可以有效提高生产效率,降低物流成本。
Q2-400D | 举升高度(mm) | 60 |
| 额定载荷(kg) | 400 | |
| 导航 | 二维码/LSAM | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 820 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 780*545*300 | |
| 额定运行速度(空载)(m/s) | 2.0 | |
| 重量(公斤) | 93 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
Q3-600D | 举升高度(mm) | 60 |
| 额定载荷(kg) | 600 | |
| 导航 | 二维码/LSAM | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 995 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 950*650*250 | |
| 额定运行速度(空载)(m/s) | 2.0 | |
| 重量(公斤) | 132 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
Q7-1000E | 举升高度(mm) | 60 |
| 额定载荷(kg) | 1000 | |
| 导航 | 二维码/LSAM | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 1200 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 1150*820*254 | |
| 额定运行速度(空载)(m/s) | 2.0 | |
| 重量(公斤) | 172 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
Q8-2000A | 举升高度(mm) | 100 |
| 额定载荷(kg) | 2000年 | |
| 导航 | 二维码/LSAM | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 1780 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 1523*1150*327 | |
| 额定运行速度(空载)(m/s) | 0.9 | |
| 重量(公斤) | 550 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
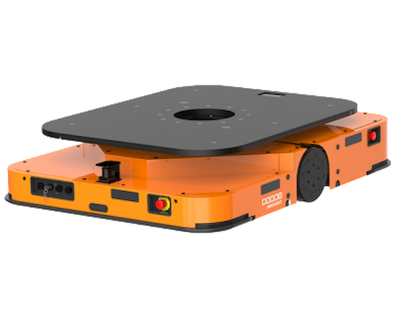
2、底盘类型
潜伏机器人底盘车是具有上层扩展功能和底盘移动能力的机器人平台。其特点是桌子有自己的上部安装孔,并为上部机构提供集成接口板以获得硬件接口;可适应多种上层扩展需求,如滚筒、小型机械臂、巡检相机、环境检测设备等,并具有丰富的功能二次开发和扩展能力,可广泛应用于各种工业、仓储物流、智能制造等场景。
Q3B-600C-D | 举升高度(mm) | / |
| 额定载荷(kg) | 600 | |
| 导航 | 二维码 | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 995 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 950*650*300 | |
| 额定运行速度(空载)(m/s) | 2.0 | |
| 重量(公斤) | 126 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
Q3B-600L-D | 举升高度(mm) | / |
| 额定载荷(kg) | 600 | |
| 导航 | LSAM | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 995 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 950*650*300 | |
| 额定运行速度(空载)(m/s) | 2.0 | |
| 重量(公斤) | 126 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
Q7B-1000C-E | 举升高度(mm) | / |
| 额定载荷(kg) | 1000 | |
| 导航 | 二维码 | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 1200 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 1150*820*300 | |
| 额定运行速度(空载)(m/s) | 2.0 | |
| 重量(公斤) | 184 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
Q7B-1000L-E | 举升高度(mm) | / |
| 额定载荷(kg) | 1000 | |
| 导航 | LSAM | |
| 爬坡能力(°) | 3 | |
| 回转直径(mm) | 1200 | |
| 额定运行时间(h) | 8 | |
| 尺寸长*宽*高(mm) | 1150*820*300 | |
| 额定运行速度(空载)(m/s) | 2.0 | |
| 重量(公斤) | 184 | |
| 定位精度(mm,°) | ±10/±1 | |
| 充电时间(h) | ≤1.5 | |
| 驱动方式 | 差动驱动 |
特点 叉车AGV
应用领域




Add: NO.409 West Jianshe Road, Economic Development Zone, Jinhu County, Jiangsu Province, China
请继续阅读、关注、订阅,我们欢迎您告诉我们您的想法。



 中文
中文 English
English español
español 日本語
日本語 한국의
한국의 Deutsch
Deutsch français
français العربية
العربية português
português русский
русский







 网络支持
网络支持
